

Robot móvil autónomo
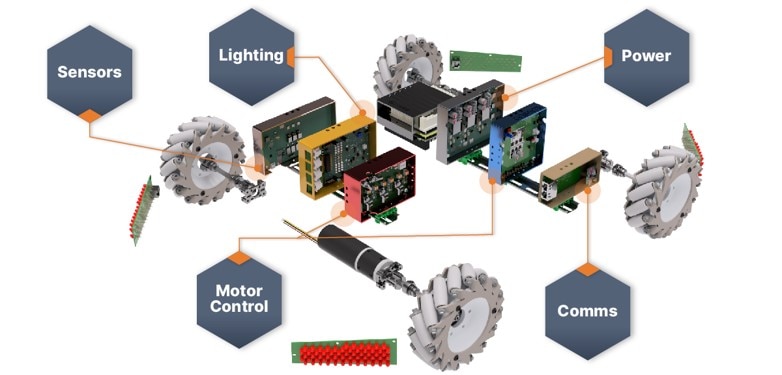
El concepto de Robot Móvil Autónomo de onsemi es una solución robótica integral diseñada con soluciones altamente eficientes e innovadoras de onsemi. El concepto puede utilizarse para diseñar diversos tipos de robots, cobots, herramientas eléctricas y vehículos autónomos guiados mediante la combinación de diferentes soluciones inteligentes y eléctricas de onsemi.
- Kits de control de motores BLDC
- Carga de baterías y conversión de potencia
- Sensores de imágenes y soluciones Lidar
- Soluciones de conectividad
- Iluminación LED
- Cobots y robots industrialesU
- Robots de almacén
- Robots de reparto
- Herramientas eléctricas
- Robots agrícolas
- Cortadoras de césped
- Vehículos guiados autónomos

Vídeo sobre robots móviles autónomos -

Entrevista de Embedded World 2024 -

Hablemos de tecnología: robótica e inteligencia artificial física -
- Soluciones de control de motores BLDC
- Soluciones de detección
- Soluciones de alimentación
- Soluciones de iluminación
- Soluciones de comunicación
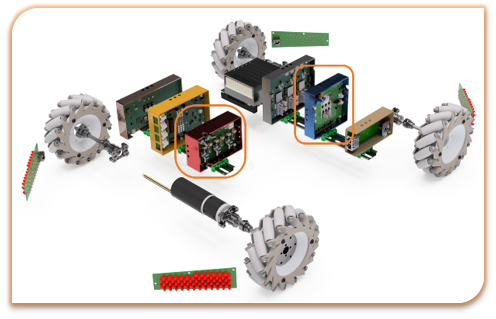
Soluciones de control de motores BLDC
En primer lugar tenemos la solución de control de motores BLDC y ahí sí que podríamos elegir tres plataformas diferentes. El primero nuestra nave de desarrollo de motores integrados basada en ecospin. Se trata de una solución totalmente integrada para el control de motores BLDC. Integra diodos de arranque. Además de un amplificador sensorial, un controlador de compuerta y un microcontrolador. El firmware está disponible.
La segunda solución es el sistema basado en Xilinx que utiliza controladores de compuerta discretos y MOSFETS. Puede utilizarse para plataformas en las que se necesite más potencia de cálculo a nivel de control del motor.
Y por último, tenemos una solución basada en herramientas eléctricas.
Productos destacados

NCD83591MNTXG
Ver detalles
NVMFS5C410NWFAFT1G
Ver detalles
NCP730BMT250TBG
Ver detalles
NCH-RSL15-512-101Q40-ACG
Ver detalles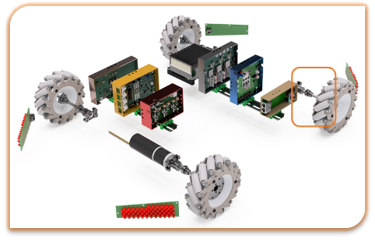
Soluciones de detección
El robot autónomo necesita ver por dónde va: por eso necesita un sensor de imagen y un módulo de cámara. Nuestra demostración utiliza un módulo de cámara USB E-con. Utiliza un sensor de imagen con obturador global, ideal para robots autónomos. Los sensores de obturación global almacenan los datos de los píxeles de cada imagen al mismo tiempo. Este tipo de sensores no presentan los artefactos de movimiento que se observan en los sensores de persiana enrollable, por lo que son ideales para su uso cuando se desplaza por fábricas o almacenes. Los sensores de obturación rotativa tienen un mayor rango dinámico que los sensores de obturación global, por lo que pueden funcionar mejor cuando hay diferencias extremas en las condiciones de iluminación. Sin embargo, en el caso de los robots autónomos que trabajan en fábricas, las condiciones de iluminación son adecuadas para permitir el uso de sensores de obturación global. El sensor de imagen AR0234CS admite imágenes Full HD a una velocidad de fotograma de sesenta fotogramas por segundo.
Los robots autónomos con brazos móviles utilizan servomotores para controlar la posición de los brazos y las agarraderas. Para ello se requiere una retroalimentación precisa de la posición. Además, si el robot autónomo se apaga y se vuelve a encender, es importante conocer la posición exacta del brazo. Un sensor de posición absoluta puede determinar la posición del brazo en cualquier momento. Los sensores ópticos pueden hacerlo, pero necesitan muchos componentes externos y son sensibles a las variaciones de temperatura. Onsemi es un proveedor establecido de sensores de posición personalizados de alta fiabilidad para el mercado automotriz. A partir de esta experiencia, hemos desarrollado una solución de doble sensor de posición inductivo que utiliza el controlador de sensores NCS32100. Más adelante hablaré con más detalle de este producto.
Productos destacados

AR0234CSSM00SUKA0-CR
Ver detalles
AR1335CSSM11SMKA0-CP
Ver detalles
AR0822NPSC10SMTA0-DR
Ver detalles
NCS32100XMNTXG
Ver detalles
NCV75215DB001R2G
Ver detalles
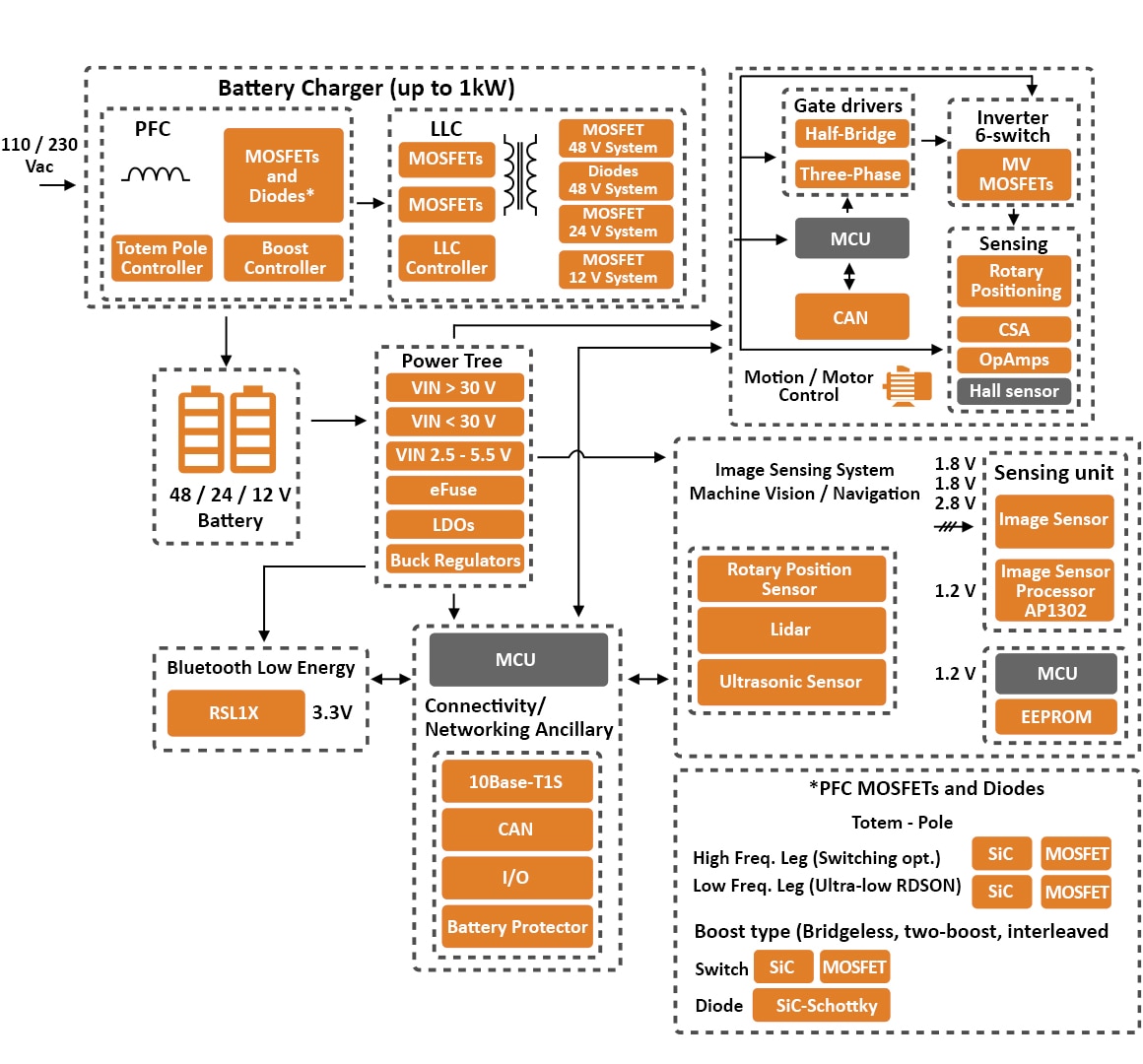
Soluciones de alimentación
Veamos ahora la fuente de alimentación del robot autónomo. Es cierto que funciona con batería, pero ésta debe cargarse en algún momento. El robot autónomo tiene la inteligencia necesaria para conducir hasta el punto de carga. Un brazo robótico externo conecta el cable de alimentación al robot autónomo para cargarlo.
El cargador de baterías de 600 W de CA de entrada de red para el robot autónomo consta de tres secciones: una etapa PFC, un convertidor LLC aislado y un convertidor reductor. La etapa PFC es una etapa PFC entrelazada doble que utiliza el controlador NCP1632 PFC. Esto garantiza que la alimentación de CA tenga un buen factor de potencia y una distorsión armónica total baja. La etapa LLC convierte la salida de la etapa PFC, que es algo así como 400VCC, a un voltaje de salida de 48VCC utilizando una topología LLC con una topología de medio puente con toma central. El NCP1399 se utiliza en el diseño actual, mientras que el NCP13994, más avanzado, se recomienda para diseños más recientes. La salida se rectifica de forma sincrónica mediante dos MOSFET de media tensión FDMS86202ET controlados por dos controladores de rectificación sincrónica NCP4305D.
Los perfiles de carga de la batería incluyen modos de carga de corriente constante que dan lugar a un amplio rango de voltajes de funcionamiento. Las etapas LLC tienen un rango de funcionamiento estrecho para su relación de conversión de voltaje, o ganancia, por lo que no funcionan bien en modo de corriente constante. En el cargador autónomo del robot, hay una tercera etapa reductora que utiliza el FAN65008 y que puede funcionar con una amplísima gama de relaciones de conversión de voltaje, por lo que puede proporcionar fácilmente los perfiles de corriente y voltaje necesarios para la carga de baterías.
Productos destacados

NCP1681ABD2R2G
Ver detalles 10-DFN (4x4)")
NCP51530BMNTWG
Ver detalles
NCP51561BADWR2G
Ver detalles 291W (Tc) orificio pasante TO-247-3")
NTHL045N065SC1
Ver detalles
NCP13994AADR2G
Ver detalles
NCP51561BADWR2G
Ver detalles
NTHL045N065SC1
Ver detalles
NCP4318ALSDR2G
Ver detalles
NCP1076STAT3G
Ver detalles
FAN65008B
Ver detalles
FODM1008
Ver detalles, 102A (Tc) 3.3W (Ta), 187W (Tc) Montaje en superficie 8-PQFN (5x6)")
FDMS86202ET120
Ver detalles
RSL15
Ver detalles
Soluciones de iluminación
Nuestra solución para robots autónomos está equipada con luces LED para mostrar su presencia a las personas y a otros robots. Para la señalización se utilizan luces LED adicionales. Onsemi es un proveedor consolidado de soluciones de faros delanteros, traseros, luces de circulación diurna y luces de señalización para el mercado automotriz y los vehículos industriales. Seleccionamos dos productos de esta amplia cartera para utilizarlos en nuestro robot autónomo.
La solución NCV7685 para luces LED traseras de automóviles es un controlador + solución MOSFET integrada fácil de usar. Hay 12 canales paralelos de 60 mA que se controlan mediante modulación por ancho de pulsos a través de una interfaz I2C. Si el diseñador desea utilizar el controlador led sin un microcontrolador externo, puede preprogramar registros OTP específicos para establecer el ciclo de trabajo. El controlador LED dispone de diagnósticos de fallo que pueden ser leídos por el microcontrolador para detectar errores específicos como condiciones de cortocircuito en el pin que ajusta la corriente, un error en la comunicación I2C, advertencia térmica, apagado térmico y condiciones de carga abierta. El microcontrolador puede utilizar esta información para llevar a cabo las acciones correctivas necesarias, como comunicar el error a un controlador central que supervise los robots autónomos locales.
Productos destacados

NCV7685DQR2G
Ver detalles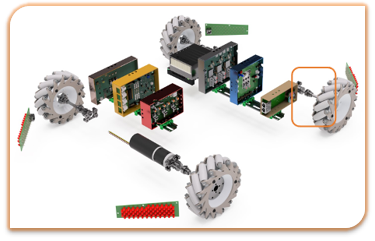
Soluciones de comunicación
Tradicionalmente, los proveedores de robótica seleccionaban el protocolo CAN automotriz para la comunicación por cable entre diferentes nodos dentro del robot, incluidos BLDC, iluminación, procesador y algunos sensores. CAN lleva décadas utilizándose con cableado de par trenzado sin blindaje (UTP), ligero y económico, en una topología multipunto o en cadena, lo que facilita la comunicación entre nodos a una velocidad de entre 2 Mbps y 5 Mbps. Mientras tanto, a medida que los robots adquieren mayor autonomía o trabajan en mayor armonía con los seres humanos, es necesario aumentar la inteligencia robótica. La inteligencia robótica se mejora añadiendo más procesamiento y sensores al robot, incluyendo Lidar, sensores de imagen, ultrasónicos, radar y posicionamiento inductivo. Los sensores de imagen y Lidar están impulsando más enlaces de comunicación punto a punto (p2p) hacia el nodo del procesador, lo que requiere velocidades de datos más rápidas, como Gigabit Ethernet. Una desventaja del CAN es que se necesita una pasarela entre Ethernet y CAN, ya que los protocolos son diferentes.
En 2019, Ethernet Alliance ratificó el estándar IEEE802.3cg para 10BASE-T1S, como un reemplazo CAN "All-Ethernet". Ahora, con 10BASE-T1S, puede comunicarse de 2 a 3 veces más rápido que CAN en los mismos dos cables (SPE: Single Pair Ethernet) y renunciar al costo y peso adicionales de la puerta de enlace utilizando los controladores NCN26010 o NCN26000 de onsemi.
Productos destacados

NCN26010
Ver detalles
NCN26000
Ver detalles
NCV7340
Ver detalles
NCV7342
Ver detalles
NCV7343
Ver detalles
NCV7344
Ver detalles
NCV7349
Ver detalles
NCV7351
Ver detalles
NCV7356
Ver detalles
NCV7357
Ver detalles
NCV7390
Ver detalles
NCV7446
Ver detalles
NCV7450
Ver detalles

