

 Technologies driving drones, autonomy, and eVTOL
Technologies driving drones, autonomy, and eVTOL
Learn how onsemi's system-level solutions enable next generation aerial capabilities.
 Webinar – Preventing Costly Downtime with Proper VFD Cable Selection and Installation
Webinar – Preventing Costly Downtime with Proper VFD Cable Selection and Installation
Choosing the wrong cable VFD cable can lead to motor failure, electromagnetic interference (EMI), costly downtime, and even safety risks.
Accelerate motor control development with NXP MCX and FreeMASTER. Explore hardware setup, real-time debugging, and ready-to-run BLDC and PMSM demos for industrial, robotics, and smart appliance applications.
 Testco
Testco
Testco supplies a comprehensive range of products - relays, solenoids, sensors, LEDs, resistors, circuit protection, switches, and power components - serving customers across the semiconductor, test & measurement, medical, industrial, automation, consumer applications, defense, and more.
 Low-Cost, Power Efficient EMG Prosthetic Hand (Part 2)
Low-Cost, Power Efficient EMG Prosthetic Hand (Part 2)
Creating a low-cost prosthetic arm is challenging, but making one that is also easy to calibrate and accurate is even tougher.
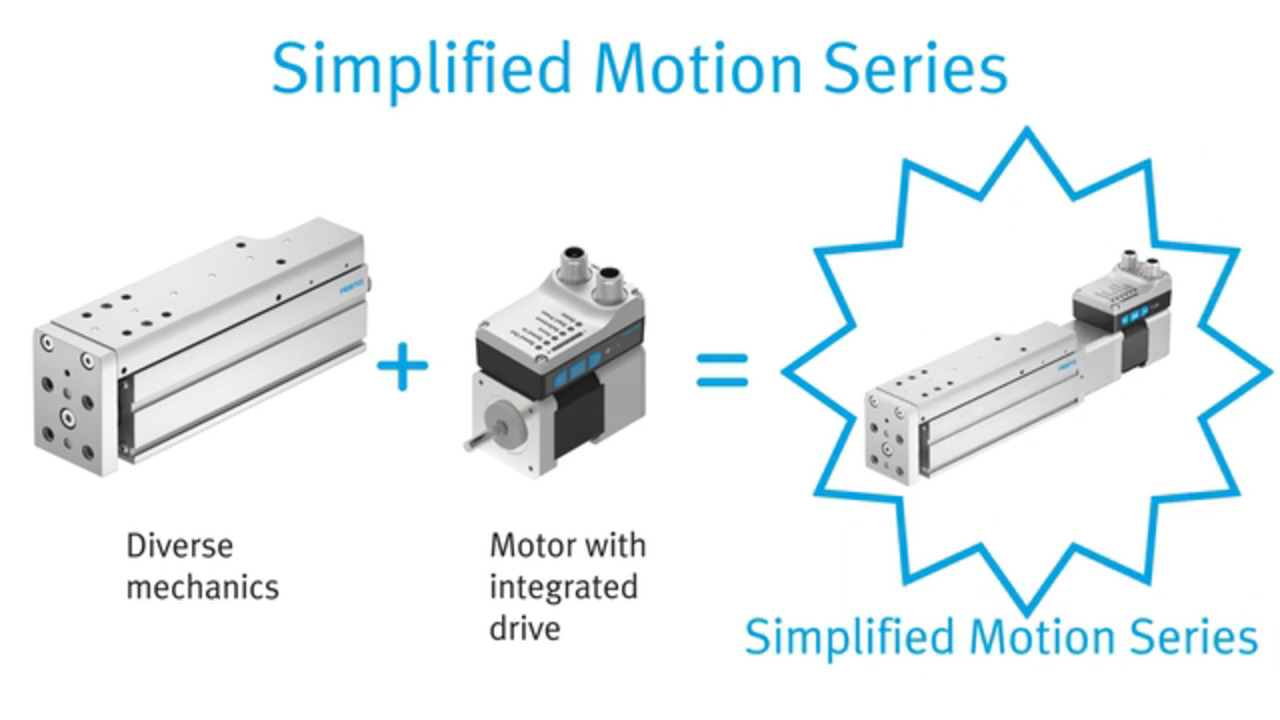
Discover Festo’s Simplified Motion Series (SMS), an easy to use electric actuator solution that bridges pneumatic simplicity with electric automation for positioning, pressing, and handling applications.
 DigiKey amplía la línea de productos en stock con casi 31,000 piezas nuevas y 97 proveedores en el primer trimestre de 2026
Fecha de publicación: 2026-04-28
DigiKey amplía la línea de productos en stock con casi 31,000 piezas nuevas y 97 proveedores en el primer trimestre de 2026
Fecha de publicación: 2026-04-28
DigiKey agregó casi 31,000 nuevos productos de reposición disponibles para envío rápido en el primer trimestre de 2026.
 Driving cost efficiency for OEMs and panel builders with the ATV320
Driving cost efficiency for OEMs and panel builders with the ATV320
This webinar will introduce how the Schneider Electric Altivar™ ATV320 variable frequency drive (VFD) helps meet those challenges through a combination of flexible installation options, broad motor compatibility, and powerful embedded features.
 Controlling an XRP Robot with Home Assistant via ESPHome
Actualizado: 2026-03-26
Controlling an XRP Robot with Home Assistant via ESPHome
Actualizado: 2026-03-26
Build a low-latency XRP robot control system using ESPHome and a UART WiFi bridge. Stream sensors, control motion, and integrate with Home Assistant.
 Seminario web – Tecnologías que impulsan drones, autonomía y eVTOL
Seminario web – Tecnologías que impulsan drones, autonomía y eVTOL
Este seminario web presenta cómo el variador de frecuencia Altivar™ ATV320 de Schneider Electric ayuda a abordar los retos del control motor.
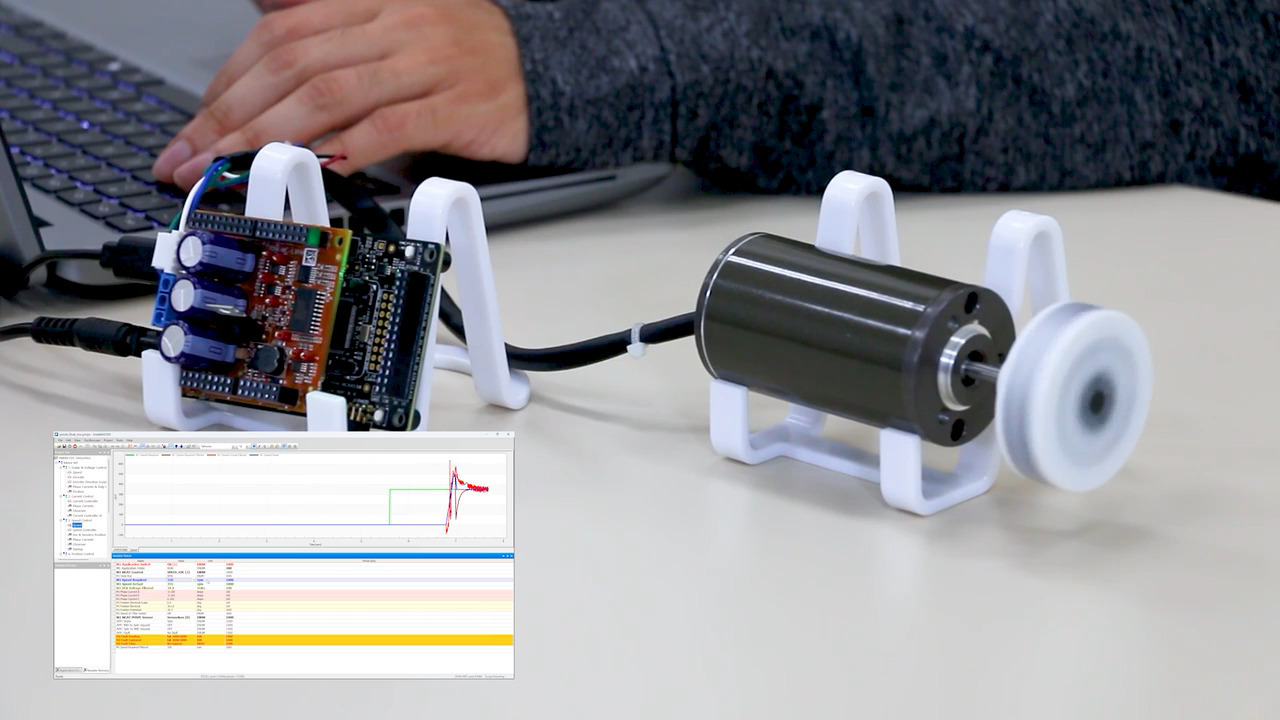
 Building a Dynamometer for the Openwheel Project - Part 1
Building a Dynamometer for the Openwheel Project - Part 1
Explore a custom-built dyno for hub motors using load cells and Arduino, enabling accurate power and torque measurements.
 Seminario web: Impulsar la eficiencia de costos para OEM y constructores de paneles con el ATV320
Seminario web: Impulsar la eficiencia de costos para OEM y constructores de paneles con el ATV320
Este seminario web presenta cómo el variador de frecuencia Altivar™ ATV320 de Schneider ayuda a abordar los retos del control motor.
This unboxing video gets you started on building motor-control based applications using PSOC™ Control C3 (KIT_PSC3M5_2GO). The kit is supported by application notes, code examples, training materials and ModusToolbox™.
 Soluciones de semiconductores de uso automotriz para alimentación, control de motores y aislamiento
Fecha de publicación: 2026-04-01
Soluciones de semiconductores de uso automotriz para alimentación, control de motores y aislamiento
Fecha de publicación: 2026-04-01
Explore las soluciones de semiconductores para uso automotriz de Toshiba, que incluyen MOSFET, diodos, dispositivos de aislamiento y circuitos integrados de controladores de motor. Diseñado para ofrecer fiabilidad y cumplir la norma AEC-Q100 en aplicaciones de VE, BMS y energía.

This video explores how Autonomous Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs) are revolutionizing modern manufacturing and logistics by automating material flow.
 Cómo seleccionar los cables para un control fiable del motor VFD y la retroalimentación del sensor
Fecha de publicación: 2026-03-24
Cómo seleccionar los cables para un control fiable del motor VFD y la retroalimentación del sensor
Fecha de publicación: 2026-03-24
El aumento de la automatización industrial y la búsqueda de una mayor eficiencia energética están acelerando la adopción de los variadores de frecuencia en los sistemas accionados por motor.
 Arietes hápticos magnéticos lineales MAG1020BEL40
Fecha de publicación: 2026-03-19
Arietes hápticos magnéticos lineales MAG1020BEL40
Fecha de publicación: 2026-03-19
Los arietes hápticos magnéticos lineales MAG1020BEL40 de INEED Motors ofrecen una respuesta háptica ultrasensible y de alta fidelidad para una nueva generación de dispositivos interactivos.

Introduction & Setup on Dart Controls' EZ VFD.
 Accelerating the evolution of smart robotics and autonomous machines
Accelerating the evolution of smart robotics and autonomous machines
From collaborative robots on factory floors to autonomous mobile robots in dynamic environments, learn how ADI’s innovative technologies deliver real-time perception, localization, motion control, and secure connectivity—enabling smarter, safer, and more adaptable machines.

Our customers are constantly upgrading their automation systems. Adding digital control is a common step, and this product is the result of many requests for a digital speed setting control with the option of NOT requiring and encoder.

