Los nuevos actuadores piezoeléctricos incluyen una realimentación háptica mejorada a los diseños de pantallas táctiles portátiles,
Colaboración de Editores de DigiKey de América del Norte
2020-02-13
Las interfaces de usuario con pantalla táctil se están volviendo omnipresentes debido a sus claras ventajas sobre las interfaces mecánicas. Para los consumidores, la interfaz es ingeniosa e intuitiva, y para los usuarios industriales una pantalla sellada evita los problemas de entrada de suciedad y humedad. Sin embargo, hay desventajas para ambos grupos de usuarios. Por ejemplo, los consumidores pueden perder la comodidad y la satisfacción que se deriva del clic de un interruptor mecánico, mientras que los usuarios industriales pueden tener dificultades para confirmar la pulsación de un botón si manejan la pantalla táctil con una mano enguantada.
La retroalimentación háptica, en la que la vibración indica el funcionamiento de los botones, se ha utilizado para superar la falta de tacto de las pantallas táctiles, pero las soluciones existentes tienden a utilizar sistemas mecánicos voluminosos y complejos. Estos incluyen motores de vibración de masa giratoria excéntrica (ERM) y actuadores de resonancia lineal (LRA). La retroalimentación háptica piezoeléctrica ofrece una alternativa más compacta y flexible. Sin embargo, hasta hace poco, sus altos voltajes de funcionamiento dificultaban su uso en aplicaciones de bajo consumo de energía, un requisito crucial para los productos finales que funcionan con baterías.
Sin embargo, los avances en las soluciones hápticas piezoeléctricas de "alta definición" no sólo responden a las preocupaciones sobre el consumo de energía, sino que también aportan otras ventajas al diseño de la interfaz háptica, como un factor de forma compacto y de bajo perfil, una retroalimentación de alta fuerza y un tiempo de respuesta rápido.
En este artículo se analizan brevemente las ventajas de los nuevos actuadores piezoeléctricos hápticos sobre los ERM y los LRA antes de introducir una nueva generación de dispositivos basados en estructuras multicapa y modos de conducción bipolares que, junto con los conductores eficientes y dedicados, abordan las preocupaciones anteriores sobre el consumo de energía. A continuación, el artículo muestra cómo un ingeniero puede aprovechar estos actuadores y conductores en su próximo producto de retroalimentación háptica con pantalla táctil utilizando ejemplos hápticos de TDK y conductores de Boréas Technologies y Texas Instruments (TI).
Opciones de retroalimentación háptica
Los diseñadores que buscan añadir retroalimentación háptica a su interfaz de pantalla táctil tienen tres opciones para elegir: ERM, LRA y actuadores piezoeléctricos. Los tres funcionan aplicando el mismo principio básico, según el cual un microcontrolador supervisa el funcionamiento y un conductor controla un actuador para generar vibración (Figura 1). Las diferencias radican en la forma en que se crea esa vibración: el ERM utiliza un peso giratorio descentrado, el LRA utiliza un peso magnético suspendido por muelles helicoidales, y el dispositivo piezoeléctrico se basa en el efecto piezoeléctrico (inverso) que provoca un cambio en las dimensiones de un cristal u objeto de cerámica cuando se somete a un campo eléctrico.
 Figura 1: Los sistemas de pantalla táctil háptica comprenden un microcontrolador, un conductor y un actuador. En este ejemplo el actuador es un dispositivo piezoeléctrico, pero los ERM y los LRA son alternativas populares. (Fuente de la imagen: Boréas Technologies)
Figura 1: Los sistemas de pantalla táctil háptica comprenden un microcontrolador, un conductor y un actuador. En este ejemplo el actuador es un dispositivo piezoeléctrico, pero los ERM y los LRA son alternativas populares. (Fuente de la imagen: Boréas Technologies)
Los ERM y los LRA han demostrado ser populares para los diseños portátiles principalmente porque ofrecen una opción de bajo voltaje (aproximadamente 3 voltios) y requieren un diseño de conductor simple. Por el contrario, los dispositivos piezoeléctricos convencionales requieren voltajes mucho más altos (hasta 200 voltios) para generar suficiente deformación mecánica para una buena experiencia de consumo. Estos altos voltajes son necesarios porque la tecnología convencional de conductores hápticos piezoeléctricos se basa generalmente en la tecnología de amplificadores de audio a escala, en lugar de haber sido diseñada desde el principio teniendo en cuenta la baja potencia. Un desafío adicional para el diseño ha sido la falta de conductores de actuadores hápticos de baja potencia dedicados, lo que ha obligado a los diseñadores a recurrir a soluciones menos eficientes.
Sin embargo, una ventaja clave de las soluciones piezoeléctricas es soportar hápticos de alta definición que mejoran la retroalimentación más allá de la simple vibración monótona. Por ejemplo, los actuadores piezoeléctricos pueden producir vibraciones que varían en frecuencia y amplitud y pueden utilizarse para significar diferentes resultados al pulsar un solo botón (figura 2).
") Figura 2: Los actuadores piezoeléctricos hápticos permiten un rango de vibraciones que pueden ser usadas para indicar diferentes resultados de la activación de un solo botón. (Fuente de la imagen: Boréas Technologies)
Figura 2: Los actuadores piezoeléctricos hápticos permiten un rango de vibraciones que pueden ser usadas para indicar diferentes resultados de la activación de un solo botón. (Fuente de la imagen: Boréas Technologies)
En resumen, las soluciones de retroalimentación háptica de alta definición requieren:
- Amplio ancho de banda: para permitir un rango de frecuencias y modos de vibración
- Aceleración alta [g]: para una fuerza de retroalimentación más fuerte
- Gran desplazamiento: que aumenta la sensibilidad de retroalimentación háptica
- Baja latencia: el tiempo de respuesta rápida aumenta el rango de retroalimentación
En el cuadro 1 se resume el rendimiento de cada una de las soluciones de retroalimentación háptica y se demuestra que las soluciones piezoeléctricas son la única opción para las aplicaciones de alta definición porque ofrecen la combinación necesaria de ancho de banda, fuerza y sensibilidad de retroalimentación y latencia.
|
Tabla 1: Comparación de las características operacionales de las soluciones de retroalimentación háptica. Los dispositivos piezoeléctricos ofrecen la buena aceleración (medida en 'g' donde 1 g es la aceleración debida a la gravedad en la superficie de la Tierra (9,81 m/s2)), el desplazamiento y el tiempo de respuesta, y las formas de onda personalizadas necesarias para la retroalimentación háptica de alta definición. (Fuente de la imagen: DigiKey, a través del autor)
Obsérvese que parte de la complejidad adicional de los controladores para los actuadores piezoeléctricos se debe a la funcionalidad adicional necesaria para generar las formas de onda personalizadas que aportan definición y contexto a la retroalimentación háptica. El ERM y el LRA no pueden soportar formas de onda personalizadas, por lo que los conductores son más sencillos.
Ventajas de los nuevos dispositivos piezoeléctricos de retroalimentación háptica
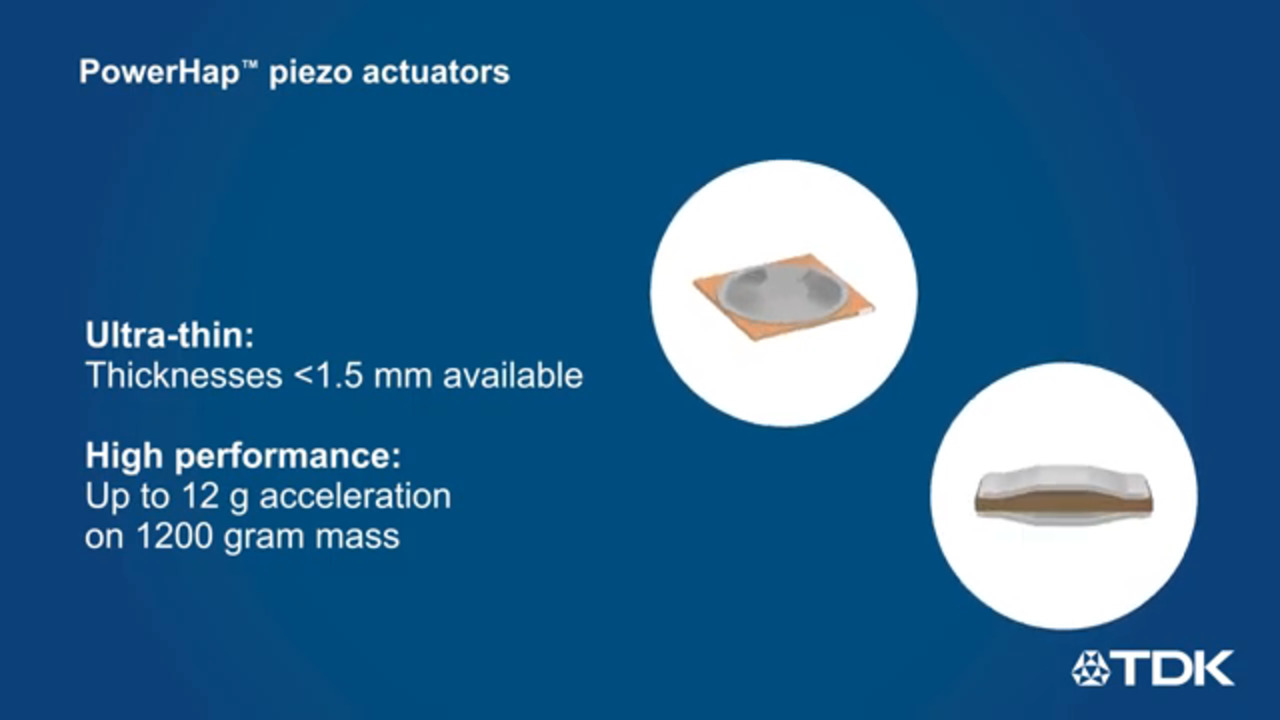
Las recientes introducciones de productos tanto para los actuadores piezoeléctricos como para los eficientes y dedicados conductores han hecho de estas tecnologías una solución mucho mejor para los productos que funcionan con baterías. Por ejemplo, los productos hápticos piezoeléctricos recientemente introducidos, como los PowerHap B54102H1020A001 (12,7 milímetros cuadrados (mm2) de superficie) y B54101H1020A001 (26 mm2) de TDK, tienen menos de 2,5 mm de altura y utilizan una estructura multicapa en lugar de la capa única empleada por los dispositivos basados en la tecnología de amplificación de audio. Esta estructura multicapa alivia las demandas del conductor hasta cierto punto al bajar el voltaje de conducción (a entre 60 y 120 voltios).
Cada capa del producto multicapa de TDK sólo se expande una pequeña cantidad en dirección "z" debido al efecto piezoeléctrico inverso. Sin embargo, debido a que el dispositivo piezoeléctrico debe mantener un volumen constante, las capas se contraen simultáneamente en la dimensión "x" e "y".
El producto TDK amplifica mecánicamente esta contracción utilizando un par de platillos en cada extremo del dispositivo piezoeléctrico para aumentar el movimiento del eje z en un factor de 15, logrando un desplazamiento de entre 35 y 65 micrómetros (µm) según el modelo (Figura 3). Bajo una carga de 100 gramos (g) (funcionamiento unipolar, onda sinusoidal de un solo pulso, 200 Hz) el actuador TDK más grande logra una aceleración de 30 g pico a pico después de sólo 1 milisegundo (ms). El rango de frecuencia de 1 a 1000 hertzios (Hz) permite a los diseñadores desarrollar a medida perfiles de retroalimentación háptica de alta definición.
 Figura 3: Los actuadores piezoeléctricos hápticos TDK utilizan una estructura multicapa y platillos para amplificar el movimiento del eje z. (Fuente de la imagen: TDK)
Figura 3: Los actuadores piezoeléctricos hápticos TDK utilizan una estructura multicapa y platillos para amplificar el movimiento del eje z. (Fuente de la imagen: TDK)
Los actuadores piezoeléctricos TDK pueden funcionar en modo unipolar o bipolar. El funcionamiento unipolar aplica un voltaje positivo a través del actuador mientras que el funcionamiento bipolar varía el voltaje entre los valores máximos positivos y negativos. La ventaja del funcionamiento bipolar es que se puede lograr un mayor desplazamiento para el mismo voltaje de pico a pico, o se puede lograr un desplazamiento igual con un voltaje de pico a pico más bajo. La desventaja es que el funcionamiento bipolar aumenta las cargas mecánicas y eléctricas del actuador (Figura 4).
 offers the same mechanical displacement as unipolar") Figura 4: La operación bipolar (derecha) ofrece el mismo desplazamiento mecánico que la unipolar pero usando un voltaje más bajo de pico a pico. (Fuente de la imagen: TDK)
Figura 4: La operación bipolar (derecha) ofrece el mismo desplazamiento mecánico que la unipolar pero usando un voltaje más bajo de pico a pico. (Fuente de la imagen: TDK)
Los proveedores de silicio también han presentado recientemente chips controladores diseñados específicamente para aplicaciones de retroalimentación háptica. Estos diseños mejorados son capaces de producir una gama de modos de vibración a través de un buen rango de frecuencia y ofrecen características de conducción unipolares o bipolares mientras funcionan con una eficiencia mucho mayor que los diseños anteriores. Ejemplos de ello son el controlador piezoeléctrico BOS1901CQT de Boréas Technologies y el controlador de potencia de motor DRV2667 de Texas Instruments.
El CI de Boréas Technologies es un controlador de actuador piezoeléctrico de un solo chip que incorpora tecnología de recuperación de energía y es capaz de generar múltiples señales de vibración. El chip puede accionar actuadores con hasta 190 voltios pk-pk de un suministro de 3 a 5,5 voltios. El BOS1901 utiliza una interfaz periférica serial de alta velocidad (SPI) y todos los ajustes son ajustables a través del front-end digital. Su típico tiempo de arranque de menos de 300 microsegundos (μs) se traduce en una baja latencia.
El chip TI es un conductor háptico piezoeléctrico con un interruptor integrado de 105 voltios y un frontal digital capaz de accionar accionadores de alto y bajo voltaje. El front-end digital libera al microprocesador de la carga de la generación de la modulación de anchura de pulso (PWM) o de la necesidad de requisitos adicionales de canales analógicos en el sistema anfitrión. El chip incluye una memoria dedicada para almacenar y recuperar formas de onda, así como un sintetizador de formas de onda avanzado. Un tiempo de arranque típico de 2 ms limita la latencia, y la protección de sobrecarga térmica evita que el dispositivo se dañe si se sobrecarga.
Diseño del sistema piezo háptico
Tanto el chip Boréas como el de TI están diseñados para funcionar en un sistema táctil que ya incluye un procesador de aplicaciones. El procesador activa la ejecución de la retroalimentación háptica a través de un SPI. Alternativamente, el diseñador puede utilizar una entrada analógica para desencadenar efectos hápticos (Figura 5).
 Figura 5: Circuito de aplicación que muestra el controlador de potencia del motor TI DRV2667. Los eventos hápticos son activados por el procesador de aplicaciones de la pantalla táctil con el chip de TI y luego accionando el dispositivo háptico piezoeléctrico. (Fuente de la imagen: Texas Instruments)
Figura 5: Circuito de aplicación que muestra el controlador de potencia del motor TI DRV2667. Los eventos hápticos son activados por el procesador de aplicaciones de la pantalla táctil con el chip de TI y luego accionando el dispositivo háptico piezoeléctrico. (Fuente de la imagen: Texas Instruments)
Debido al nivel de integración de los últimos controladores, el diseño de los sistemas de pantalla táctil con retroalimentación háptica piezoeléctrica se ha facilitado, pero algunas elecciones de componentes son importantes para optimizar el rendimiento del diseño. Por ejemplo, el voltaje de refuerzo (BST) debe ser 5 voltios mayor que el voltaje pico al que se someterá el piezoactuador. Esto permite un grado de sobrecarga del amplificador y se ajusta usando la red de resistencias divisoras R1/R2 que se muestra en la Figura 5.
La fórmula para calcular los valores de las resistencias es: V(BST) = V(FB) x (1 + R1/R2), donde V(FB) = 1.32 voltios.
Así, por ejemplo, para alcanzar la capacidad máxima de V(BST) del conductor de TI de 105 voltios, los valores de R1 y R2 podrían ser de 768 kilohmios (kΩ) y 9.76 kΩ, respectivamente.
El pico de la corriente de impulso es atraído por el suministro a través del inductor L1. Esta corriente está determinada por R(EXT), pero hay que tener cuidado de seleccionar un inductor que pueda hacer frente al límite de corriente programado (ILIM). La relación entre R(EXT) e ILIM está determinada por la fórmula:
![]()
Donde K = 10,500, VREF = 1.35 voltios, RINT (la resistencia interna del conductor) = 60 Ω, e ILIM = el límite de corriente máxima de L1.
La elección del inductor es importante para asegurar el mejor rendimiento del conductor. En el caso del chip TI, las inductancias recomendadas oscilan entre 3.3 y 22 microhilos (μH). La contrapartida es si se elige una inductancia mayor para reducir las pérdidas de conmutación del convertidor de potencia o una inductancia menor para maximizar su corriente de salida.
Las especificaciones eléctricas clave del actuador piezoeléctrico desde la perspectiva del conductor son el voltaje y la capacitancia. A la frecuencia máxima del conductor de TI de 500 Hz, por ejemplo, el dispositivo está optimizado para conducir hasta 50 nanofaradios (nF) a 200 voltios pk a pk (la capacidad de oscilación de voltaje más alta del conductor). El chip puede manejar capacitancias más grandes si el voltaje de refuerzo programado se reduce y/o el usuario limita el rango de frecuencia de entrada a 300 Hz, por ejemplo.
Otra importante elección de componente es el condensador de refuerzo (C(BST)). El condensador debe tener una capacidad de voltaje al menos igual al del voltaje de refuerzo y preferiblemente más alto. Por ejemplo, se recomienda un condensador de 250 voltios y 100 nF del tipo X5R o X7R cuando funciona a la máxima tensión de aumento del chip TI de 105 voltios. C(BST) debe tener una capacidad de trabajo mínima de al menos 50 nF. Para V(BST) de 30 a 80 voltios, un condensador de 100 voltios nominal, 100 nF es aceptable y para V(BST) de menos de 30 voltios, se recomienda un condensador de 50 voltios, 0.22 microfaradio (μF).
Se recomienda el uso de un condensador de masa (CBULK) colocado junto al inductor debido a los requisitos de corriente de la clavija de conmutación. Se recomienda un condensador cerámico del tipo X5R o X7R con una capacidad de al menos 1 μF.
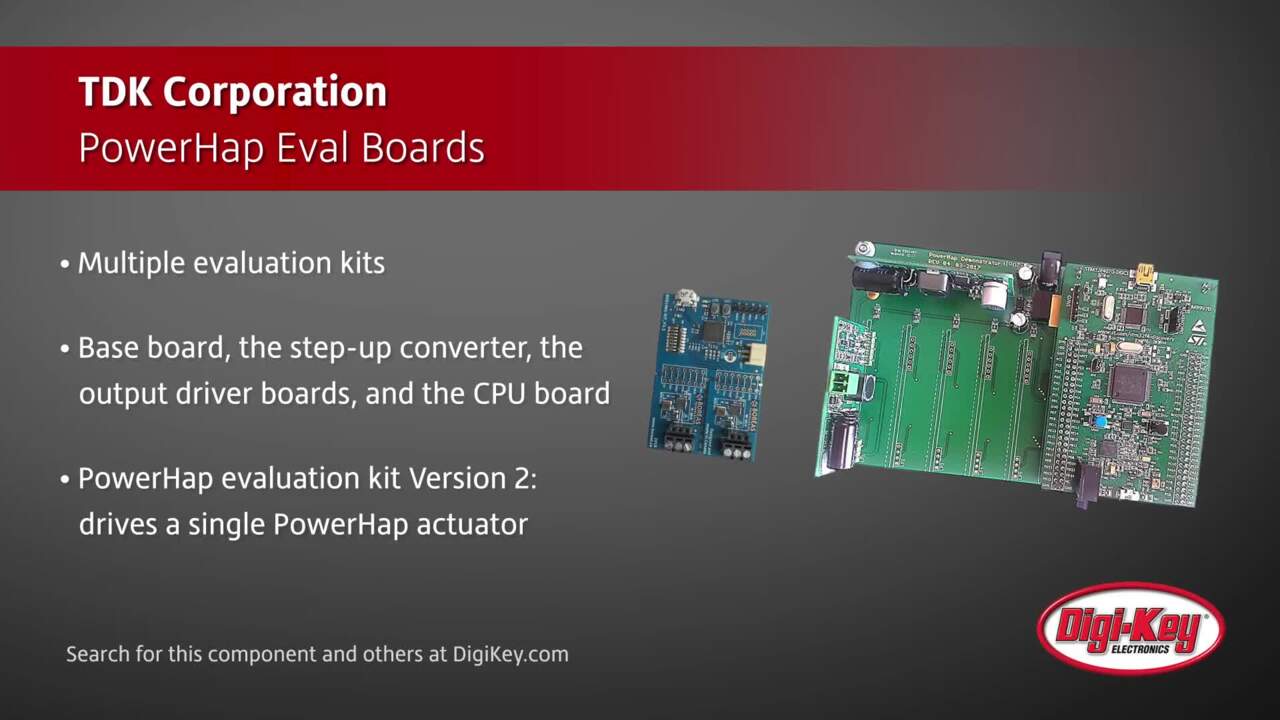
Herramientas de desarrollo
Para los ingenieros que deseen experimentar con las capacidades de los actuadores piezoeléctricos hápticos de TDK antes de comprometerse con el hardware, la compañía ofrece el kit de evaluación de un solo canal Z63000Z2910Z 1Z 1 PowerHap. El kit comprende una placa base, un convertidor de paso, una placa conductora de salida y una placa de microcontrolador.
El kit viene con un software de configuración que se ejecuta en un PC con Windows 7 (o posterior). Una vez cargado el software, el kit se conecta al PC a través de un cable USB y se alimenta aplicando 12 voltios (DC). El software proporciona entonces una interfaz para configurar la respuesta háptica del actuador cuando se presiona. La interfaz permite la configuración de los siguientes parámetros de señal (Figura 6):
- Amplitud - 5 a 100 por ciento (115 voltios)
- Frecuencia - 20 a 300 Hz
- Forma de onda (trapezoidal, onda cuadrada sinusoidal, diente de sierra)
- Ciclo de trabajo trapezoidal - 35 a 75 por ciento
- Conteo de pulso - 1 a 1000
- Nivel de disparo - 0 a 12 voltios (cuanto más bajo es el nivel de disparo más fuerte debe ser presionado el actuador para activar la señal)
- Tiempo de retardo (durante el cual el actuador no detecta ninguna fuerza)
 Figura 6: El software del kit de evaluación TDK PowerHap presenta una interfaz de configuración de señales. Una vez establecida, la configuración puede ser enviada al procesador de la placa de evaluación a través del botón "Transmitir configuración". (Fuente de la imagen: TDK)
Figura 6: El software del kit de evaluación TDK PowerHap presenta una interfaz de configuración de señales. Una vez establecida, la configuración puede ser enviada al procesador de la placa de evaluación a través del botón "Transmitir configuración". (Fuente de la imagen: TDK)
El software también permite al ingeniero crear formas de onda personalizadas. Una vez configurado el software, la información se envía al procesador del kit a través del cable USB.
Un segundo kit de evaluación, el PowerHap Z63000Z2910Z1Z44, está diseñado específicamente para los ingenieros que aprovechan el conductor piezoeléctrico Boréas BOS1901CQT. Este kit incluye una placa base, un convertidor de paso, dos controladores y un microcontrolador. El kit de base se suministra con un actuador piezoeléctrico háptico TDK (Figura 7).
 Figura 7: El kit de evaluación PowerHap Z63000Z2910Z1Z44 de TDK utiliza los controladores piezoeléctricos Boréas y cumple con el protocolo de audio USB, lo que simplifica la configuración. (Fuente de la imagen: TDK)
Figura 7: El kit de evaluación PowerHap Z63000Z2910Z1Z44 de TDK utiliza los controladores piezoeléctricos Boréas y cumple con el protocolo de audio USB, lo que simplifica la configuración. (Fuente de la imagen: TDK)
La placa se conecta a un PC a través de un cable USB, utiliza el protocolo de audio USB estándar y aparece como una salida de audio normal en cualquier ordenador. La creación de prototipos de formas de onda (hasta 190 voltios pk a pk) y la reproducción pueden realizarse utilizando el protocolo de audio USB para crear prototipos de efectos hápticos en software como MATLAB, Python y Audacity.
Conclusión
La retroalimentación háptica mediante actuadores piezoeléctricos, ERM y LRA ha mejorado el control de la pantalla táctil tanto en aplicaciones de consumo como industriales. Sin embargo, los avances en la dirección de los actuadores hápticos piezoeléctricos compactos de menor voltaje han extendido los beneficios de la retroalimentación háptica de alta definición a los dispositivos que funcionan con baterías.
Al mismo tiempo, el diseño de los sistemas piezoeléctricos hápticos se ha facilitado con la introducción de controladores dedicados que interactúan con los procesadores de aplicaciones populares y ofrecen soporte para una amplia gama de formas de onda. La disponibilidad de kits de evaluación para estos dispositivos de proveedores como TDK permite la experimentación y la creación de prototipos antes de comprometerse con el diseño del hardware.
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.