Cómo implementar rápidamente módulos GNSS de posicionamiento multiconstelación
Colaboración de Editores de DigiKey de América del Norte
2021-09-09
El uso de funciones basadas en la posición mediante receptores del sistema global de navegación por satélite (GNSS) multiconstelación para Galileo de Europa, el Sistema de Posicionamiento Global (GPS) de Estados Unidos, GLONASS de Rusia, el sistema de navegación por satélite BeiDou de China y el QZSS de Japón está creciendo en toda una serie de aplicaciones, como la robótica, los vehículos autónomos, la automatización industrial, la logística y el seguimiento de activos, los drones y los equipos agrícolas y de construcción pesada. Las ventajas de utilizar receptores GNSS multiconstelación son, entre otras, una mayor disponibilidad de las señales de posición, navegación y temporización (PNT), una mayor precisión e integridad y una mayor solidez de las aplicaciones.
Pero el desarrollo de receptores multiconstelación es una actividad compleja y que requiere mucho tiempo, ya que incluye: la optimización de la antena de banda L; el diseño del extremo frontal de radiofrecuencia (RF); la integración de los algoritmos de procesamiento de señales de banda base para adquirir, rastrear y aplicar correcciones a las distintas señales PNT; la codificación del software de procesamiento de la aplicación para extraer los datos PNT de cada canal de la banda base y utilizar la información para implementar las funciones del sistema. Los diseñadores también deben elegir una antena adecuada y colocarla correctamente.
Como alternativa, los diseñadores pueden recurrir a módulos GNSS prediseñados y a entornos de desarrollo para integrar de forma rápida y eficaz la capacidad de posicionamiento en un sistema. Estos módulos GNSS incluyen el front-end de RF, el procesamiento de banda base y el firmware integrado para acelerar el desarrollo del software de procesamiento de aplicaciones. Algunos módulos GNSS también incluyen las antenas.
Este artículo repasa los fundamentos del GNSS, el PNT y el funcionamiento de los receptores GNSS multiconstelación. A continuación, se analizan los pros y los contras de la integración de antenas en los módulos GNSS antes de presentar varios módulos GNSS -con y sin antenas integradas-, así como las placas de evaluación asociadas de STMicroelectronics, Septentrio y Würth Elektronik que los diseñadores pueden aplicar para el desarrollo eficiente y rentable de aplicaciones precisas y resistentes basadas en la posición.
¿Qué son el GNSS y el PNT?
El GNSS y el PNT son conceptos estrechamente relacionados. Los satélites GNSS son la fuente más común de señales PNT. Los satélites GNSS son esencialmente relojes sincronizados de gran precisión que emiten constantemente su información PNT. Un módulo GNSS recibe las señales PNT de un determinado satélite y calcula su distancia a dicho satélite. Cuando el receptor conoce la distancia de al menos cuatro satélites, puede estimar su propia posición. Sin embargo, la precisión de la estimación de la posición se ve afectada por una serie de fuentes de error, entre ellas:
- Deriva del reloj de los circuitos de mantenimiento de la hora en los satélites GNSS
- Inexactitudes en la predicción de la posición orbital exacta de los satélites GNSS
- Desviación general del rendimiento del equipo del satélite en relación con otros satélites, también conocida como sesgo del satélite
- Distorsiones y retrasos en la transmisión de la señal a su paso por la ionosfera y la troposfera.
- Reflexión multitrayectoria y rendimiento variable y deriva en el receptor
Los diseñadores disponen de varias técnicas para corregir los errores del GNSS basados en los satélites y en la atmósfera.
Mejora del rendimiento del GNSS
La mejor manera de minimizar el impacto de los errores originados en el receptor GNSS es utilizar el receptor de mayor rendimiento que se ajuste a las limitaciones de costo y tamaño de una aplicación determinada. Sin embargo, incluso los receptores de alto rendimiento no son perfectos; es muy probable que su rendimiento pueda mejorarse. Es importante entender estos métodos de corrección ya que ofrecen un rendimiento variable, y algunos módulos GNSS no son capaces de implementarlos todos.
Las estaciones de referencia terrestres son utilizadas por varios métodos de corrección del GNSS (Figura 1). Los métodos más consolidados para utilizar las estaciones de referencia terrestres para proporcionar correcciones GNSS a los receptores son la cinemática en tiempo real (RTK) y el posicionamiento puntual preciso (PPP). Más recientemente, se dispone de métodos híbridos RTK-PPP.
 Figura 1: Un receptor de usuario GNSS puede obtener información sobre errores de atmósfera, reloj y órbita de una red de referencia para mejorar la precisión del posicionamiento. (Fuente de la imagen: Septentrio)
Figura 1: Un receptor de usuario GNSS puede obtener información sobre errores de atmósfera, reloj y órbita de una red de referencia para mejorar la precisión del posicionamiento. (Fuente de la imagen: Septentrio)
El RTK se basa en una única estación base o en una red de referencia local para obtener datos de corrección que pueden eliminar la mayoría de los errores del GNSS. El RTK supone que la estación base y el receptor están muy cerca -con un máximo de 40 kilómetros (km) o 25 millas de distancia-, por lo que experimentan los mismos errores. La cinemática postprocesada o PPK es una variación de la RTK y se utiliza ampliamente en la topografía y la cartografía para obtener datos de posicionamiento de alta precisión o exactitud centimétrica.
Solo se utilizan los errores de la órbita y del reloj del satélite para realizar las correcciones de la APP. Estos errores específicos de los satélites son independientes de la ubicación del usuario, lo que limita el número de estaciones de referencia que se necesitan. Sin embargo, la PPP no tiene en cuenta los errores relacionados con la atmósfera y, por lo tanto, su precisión es menor que la de la RTK. Además, las correcciones de la APP pueden tener tiempos de inicialización de unos 20 minutos. El mayor tiempo de inicialización y la menor precisión hacen que la APP sea poco práctica para muchas aplicaciones.
Las aplicaciones que necesitan una precisión cercana al RTK y tiempos de inicialización rápidos suelen emplear el servicio de corrección GNSS más reciente, el RTK-PPP (a veces denominado representación del espacio de estado (SSR)). Utiliza una red de referencia con estaciones separadas por unos 100 km (65 millas) que recogen datos del GNSS y calculan una combinación de correcciones satelitales y atmosféricas. La red de referencia utiliza Internet, el satélite o las redes de telefonía móvil para enviar los datos de corrección a los abonados. Los receptores GNSS que utilizan RTK-PPP pueden tener precisiones inferiores al decímetro. La elección de utilizar los métodos de corrección RTK, PPP y RTK-PPP implica una serie de compromisos de diseño que los desarrolladores deben revisar para seleccionar la solución óptima para el perfil específico de la aplicación. (Figura 2).
 Figura 2: Puntos fuertes y débiles de tres métodos comunes de corrección del GNSS. (Fuente de la imagen: Septentrio)
Figura 2: Puntos fuertes y débiles de tres métodos comunes de corrección del GNSS. (Fuente de la imagen: Septentrio)
Los sistemas de aumento basados en satélites (SBAS) están empezando a estar disponibles a nivel regional para sustituir a los métodos de corrección basados en estaciones terrestres RTK, PPP y RTK-PPP. El SBAS sigue utilizando estaciones terrestres para medir los errores del GNSS, pero las estaciones están repartidas por continentes enteros. Los errores medidos se procesan en una ubicación central donde se calculan las correcciones y se transmiten a los satélites geosincrónicos que se encuentran en la zona cubierta. Los datos de corrección se emiten desde los satélites como una superposición o aumento de los datos originales del GNSS.
La precisión del GNSS depende de la disponibilidad y la exactitud de las mediciones de los satélites y las correcciones asociadas. Los receptores GNSS de alto rendimiento rastrean las señales GNSS en múltiples frecuencias y utilizan múltiples constelaciones GNSS y varios métodos de corrección para ofrecer la precisión y resistencia necesarias. La redundancia resultante permite un rendimiento estable incluso si algunas de las mediciones y datos del satélite sufren interferencias. Los diseñadores pueden elegir entre una variedad de capacidades de precisión y redundancia del GNSS (Figura 3).
 Figura 3: Grados de precisión del GNSS con los correspondientes métodos de corrección y aplicaciones seleccionadas. (Fuente de la imagen: Septentrio)
Figura 3: Grados de precisión del GNSS con los correspondientes métodos de corrección y aplicaciones seleccionadas. (Fuente de la imagen: Septentrio)
Módulos GNSS: antenas integradas o externas
Debido a la complejidad del posicionamiento multiconstelación, hay módulos disponibles de varios proveedores que ayudan a acelerar el tiempo de comercialización, reducir el costo y garantizar el rendimiento. Dicho esto, los diseñadores deben considerar si utilizar una antena interna o, por el contrario, optar por una que resida en el exterior del módulo GNSS. Para aplicaciones en las que el tiempo de comercialización y el costo son prioritarios, puede ser preferible una antena integrada, ya que la ingeniería es mucho menor. Para las aplicaciones que necesitan la certificación FCC o CE, el uso de un módulo con una antena integrada también puede acelerar el proceso de aprobación. Sin embargo, el tamaño de la solución puede aumentar y la flexibilidad puede ser limitada con las soluciones de antenas integradas.
Las antenas externas ofrecen a los diseñadores una gama más amplia de prestaciones y opciones de diseño. Se puede seleccionar una antena grande de alto rendimiento o una más pequeña y de menor rendimiento. Además, la colocación de la antena es más flexible en relación con la ubicación del módulo GNSS, lo que aumenta aún más la flexibilidad del diseño. La flexibilidad de colocación también permite que las antenas externas proporcionen un funcionamiento más fiable del GNSS. Sin embargo, la colocación de las antenas y el trazado de las conexiones puede ser un proceso complejo y largo que requiere conocimientos específicos, lo que puede aumentar los costes y ralentizar el tiempo de comercialización.
Pequeño módulo GNSS para diseños con limitaciones de espacio
Los equipos de diseño con la experiencia necesaria en la colocación y el enrutamiento de la antena pueden utilizar Teseo-LIV3F de STMicroelectronics, un módulo GNSS multiconstelación (GPS/Galileo/GLONASS/BeiDou/QZSS) que utiliza una antena externa (Figura 4). El módulo se presenta en un envase LCC-18 de 9.7 mm x 10.1 mm, y ofrece una precisión de posición de 1.5 metros (m) de error circular probable (CEP), con un tiempo hasta la primera fijación (TTFF) para el arranque en frío y en caliente tan bajo como menos de 32 segundos (s) y menos de 1.5 s, respectivamente (GPS, GLONASS). Tiene un consumo de energía en espera de 17 microvatios (µW) y un consumo de energía de seguimiento de 75 milivatios (mW).
 Figura 4: El módulo GNSS Tesco-LIV3F incluye el núcleo y los subsistemas GNSS, además de toda la conectividad y la gestión de la energía necesarias, en un paquete de 9.7 x 10.1 mm. Requiere una antena externa. (Fuente de la imagen, STMicroelectronics)
Figura 4: El módulo GNSS Tesco-LIV3F incluye el núcleo y los subsistemas GNSS, además de toda la conectividad y la gestión de la energía necesarias, en un paquete de 9.7 x 10.1 mm. Requiere una antena externa. (Fuente de la imagen, STMicroelectronics)
El oscilador de cristal compensado por temperatura (TCXO) de 26 megahercios (MHz) integrado en la Tesco-LIV3F ayuda a garantizar una gran precisión, y el oscilador de reloj en tiempo real (RTC) de 32 kilohercios (kHz) permite reducir el tiempo hasta la primera fijación (TTFF). Funciones como el registro de datos, el GNSS autónomo asistido de siete días, la reconfiguración del firmware (FW), así como las actualizaciones del FW, están habilitadas por la memoria flash integrada de 16 megabits (Mbit).
Entre las aplicaciones adecuadas para el Tesco-LIV3F se encuentran los seguros, la logística, los drones, los peajes, los sistemas antirrobo, la localización de personas y mascotas, el seguimiento de vehículos y las llamadas de emergencia.
Como solución precertificada, el uso del módulo Teseo-LIV3F puede suponer una reducción del tiempo de comercialización de la aplicación final. Tiene un rango de temperatura de funcionamiento de -40 °C a +85 °C.
Para experimentar con el módulo y acelerar el desarrollo de aplicaciones, los diseñadores pueden utilizar la placa de evaluación AEK-COM-GNSST31. Cuando se utiliza junto con el firmware del X-CUBE-GNSS1, el paquete de evaluación puede soportar las funciones de adquisición, seguimiento, navegación y salida de datos sin necesidad de memoria externa. Este EVB también está diseñado para su uso con un microcontrolador SPC5 para el desarrollo de aplicaciones de automoción.
Módulo GNSS con mitigación de interferencias
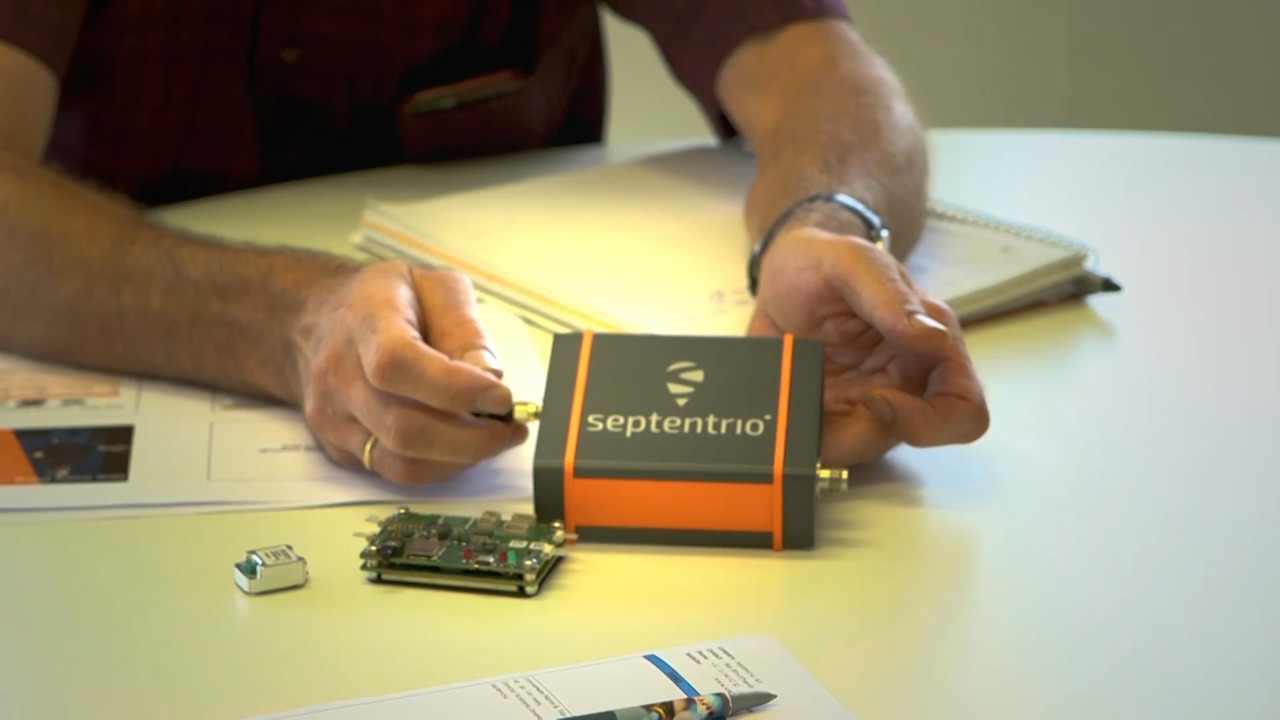
El receptor GNSS multiconstelación 410322 mosaic-X5 de Septentrio es un módulo de bajo consumo y montaje en superficie que mide 31 mm x 31 mm x 4 mm y ofrece a los diseñadores una serie de interfaces, como cuatro UART, Ethernet, USB, SDIO y dos GPIO programables por el usuario.
Diseñado para su uso en robótica, sistemas autónomos y otras aplicaciones del mercado de masas, el mosaico-X5 presenta una frecuencia de actualización de 100 hercios (Hz), una latencia inferior a 10 milisegundos (ms) y una precisión de posicionamiento RTK vertical y horizontal de 0.6 cm y 1 cm, respectivamente. Puede rastrear todas las constelaciones GNSS, soportando señales actuales y futuras, y es compatible con correcciones PPP, SSR, RTK y SBAS. El TTFF del módulo es inferior a 45 s en el arranque en frío y a 20 s en el arranque en caliente.
El mosaico-X5 cuenta con varias tecnologías patentadas por Septentrio, como AIM+, una tecnología de mitigación de interferencias integrada que suprime una gran variedad de interferencias, desde simples señales continuas de banda estrecha hasta complejos jammers de banda ancha y pulsados.
Las interfaces, los comandos y los mensajes de datos de los módulos están completamente documentados. El software RxTools incluido permite la configuración y monitoreo del receptor, así como el registro y análisis de datos.
El kit de desarrollo del mosaico-X5 410331P3161 de Septentrio permite a los diseñadores explorar, evaluar y desarrollar prototipos que aprovechen al máximo las capacidades del mosaico-X5 (Figura 5).
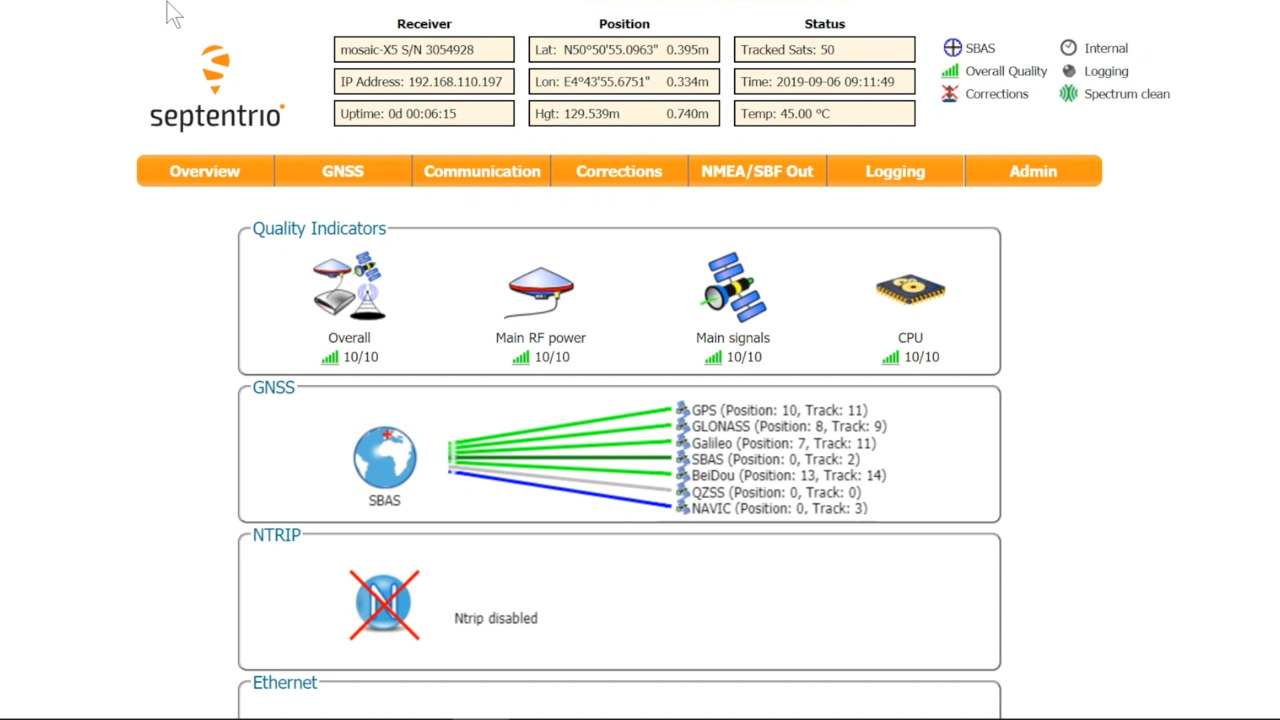
 Figura 5: Los diseñadores pueden crear un prototipo con el kit de desarrollo mosaic-X5 410331P3161 mediante diversas conexiones, como Ethernet, puertos COM o USB 2.0, o utilizando una tarjeta de memoria SD. (Fuente de la imagen: Septentrio)
Figura 5: Los diseñadores pueden crear un prototipo con el kit de desarrollo mosaic-X5 410331P3161 mediante diversas conexiones, como Ethernet, puertos COM o USB 2.0, o utilizando una tarjeta de memoria SD. (Fuente de la imagen: Septentrio)
El kit utiliza la intuitiva interfaz de usuario web de mosaic-X5 para facilitar el funcionamiento y la supervisión, lo que permite a los diseñadores controlar el módulo receptor desde cualquier dispositivo móvil u ordenador. La interfaz web utiliza indicadores de calidad fáciles de leer para supervisar el funcionamiento del receptor.
Los diseñadores pueden crear un prototipo integrando el mosaic dev-kit utilizando cualquiera de las siguientes conexiones: Ethernet, puertos COM, USB 2.0, tarjeta de memoria SD.
Módulo GNSS con antena integrada
Para los diseñadores de aplicaciones que pueden beneficiarse del uso de un módulo GNSS con una antena integrada, Würth Elektronik ofrece el módulo 2614011037000 Erinome-I con un sistema en chip (SoC) de alto rendimiento (Figura 6). El módulo es compatible con las constelaciones GNSS GPS, GLONASS, Galileo y BeiDou, y viene con una antena integrada en la parte superior que simplifica la integración del hardware y acorta el tiempo de comercialización. El módulo, incluida la antena integrada, mide 18 mm x 18 mm.
 Figura 6: El 2614011037000 Erinome-I es un módulo GNSS completo con un SoC GNSS de alto rendimiento más una antena integrada. (Fuente de la imagen: Würth Elektronik)
Figura 6: El 2614011037000 Erinome-I es un módulo GNSS completo con un SoC GNSS de alto rendimiento más una antena integrada. (Fuente de la imagen: Würth Elektronik)
También se incluyen en el módulo el TCXO, el filtro de RF, el amplificador de bajo ruido (LNA) y la memoria flash serie.
Würth también ofrece la placa de evaluación (EVB) 2614019037001 para el Erinome-I (Figura 7). El EVB también puede servir como diseño de referencia para la integración del módulo GNSS en una aplicación. Se puede utilizar un puerto USB para conectar el EVB a un PC. Un conector multipolo permite a los diseñadores acceder a todos los pines del módulo GNSS.
 Figura 7: La placa de evaluación 2614019037001 para el Erinome-I (cerca del centro de la placa, con la antena integrada visible en el centro del módulo) también actúa como diseño de referencia. (Fuente de la imagen: Würth Elektronik)
Figura 7: La placa de evaluación 2614019037001 para el Erinome-I (cerca del centro de la placa, con la antena integrada visible en el centro del módulo) también actúa como diseño de referencia. (Fuente de la imagen: Würth Elektronik)
El Software de Navegación y Satélite de Würth Elektronik (WENSS) es una sencilla herramienta de PC para interactuar con el módulo GNSS Erinome-I utilizando la interfaz UART. Es compatible:
- Control del funcionamiento del EVB
- Comunicación bidireccional con el módulo Erinome-I
- Evaluación de las características y capacidades de Erinome-I
- Familiarización con los protocolos, frases y comandos de Erinome-I
- Configuración del Erinome-I sin conocimiento de los protocolos
- Análisis sintáctico de las frases y comandos utilizados por el Erinome-I
WENSS permite evaluar fácilmente las aplicaciones de posicionamiento sin necesidad de conocimientos avanzados. Los desarrolladores experimentados también pueden utilizar WENSS para configuraciones más avanzadas.
Conclusión:
La mejor manera de conseguir una capacidad de posicionamiento precisa y fiable es utilizar múltiples constelaciones con el apoyo de la tecnología de corrección asociada. Se trata de sistemas complejos, pero los diseñadores pueden recurrir a los módulos GNSS prediseñados, a los kits de desarrollo asociados y a los entornos para comparar rápida y eficazmente las opciones e implantar funciones y servicios basados en la posición.
Lecturas recomendadas
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.